



There is an awful lot that human beings can do well, and yet there is little we do better than growing on a consistent basis. This tendency to improve, no matter the situation, has brought …
0
There is an awful lot that human beings can do well, and yet there is little we do better than growing on a consistent basis. This tendency to improve, no matter the situation, has brought the world some huge milestones, with technology emerging as quite a major member of the group. The reason why we hold technology in such a high regard is, by and large, predicated upon its skill-set, which guided us towards a reality that nobody could have ever imagined otherwise. Nevertheless, if we look beyond the surface for a second, it will become clear how the whole runner was also very much inspired from the way we applied those skills across a real world environment. The latter component, in fact, did a lot to give the creation a spectrum-wide presence, and as a result, initiate a full-blown tech revolution. Of course, this revolution eventually went on to scale up the human experience through some outright unique avenues, but even after achieving a feat so notable, technology will somehow continue to bring forth the right goods. The same has turned more and more evident in recent times, and assuming one new discovery ends up with the desired impact, it will only put that trend on a higher pedestal moving forward.
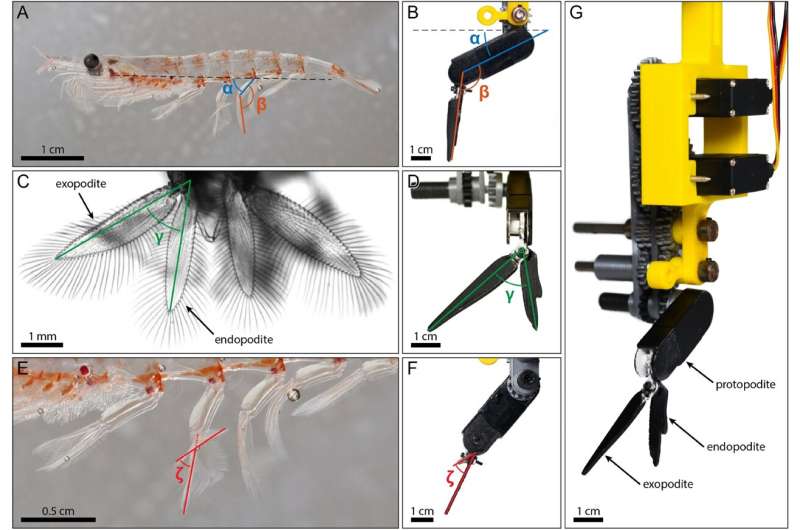
The researching team at Brown University has successfully developed a new small robotic platform called Pleobot, which will serve as a basis for them to understand the famous krill swimming method and develop small, highly maneuverable underwater robots. Before we get into these envisioned underwater robots, though, we need to acknowledge what’s a krill and why its swimming method is so well-known. Basically, Krill are aquatic athletes who have notable excellence in swimming, accelerating, braking, and turning. Such ability allows them to perform massive vertical migrations of over 1,000 meters twice on a day-to-day basis. Anyway, the stated excellence is mainly generated through their sequential deployment of their swimming legs in a back to front wave-like motion, a method which seems ideal for swarm systems to adopt for the purpose of mapping Earth’s oceans, participating in search-and-recovery missions, and if the whole thing plays out well, these swarm systems can also be sent to moons like Europa in the solar system to explore their oceans. Moving on to what makes Pleobot a suitable medium to realize this vision, the platform, at present, boasts three articulated sections that can replicate krill’s metachronal swimming technique. Provided with 10 times the scale of a krill, Pleobot is mainly constructed using 3D printable parts. However, the researchers have made a point to keep the design as open-access, thus enabling other teams to use the platform for answering questions on metachronal swimming not just for krill but for other organisms as well.
“Experiments with organisms are challenging and unpredictable,” said Sara Oliveira Santos, a Ph.D. candidate at Brown’s School of Engineering and lead author of the new study. “Pleobot allows us unparalleled resolution and control to investigate all the aspects of krill-like swimming that help it excel at maneuvering underwater. Our goal was to design a comprehensive tool to understand krill-like swimming, which meant including all the details that make krill such athletic swimmers.”
Another detail worth a mention here would be how the team involved was able to gain control over Pleobot’s two leg segments and its biramous fins, something which should contribute to a more efficient overall operation.
For the future, the researchers have already mapped out a set of improvements. To give you an example, the team is currently working to integrate into the platform morphological characteristics of shrimp like flexibility and bristles around the appendages.
“Krill aggregations are an excellent example of swarms in nature: they are composed of organisms with a streamlined body, traveling up to one kilometer each way, with excellent underwater maneuverability,” said Monica Martinez Wilhelmus, Assistant Professor of Engineering. “This study is the starting point of our long-term research aim of developing the next generation of autonomous underwater sensing vehicles. Being able to understand fluid-structure interactions at the appendage level will allow us to make informed decisions about future designs.”