



The human arsenal has always been expansive beyond all known limits, but at the same time, it hasn’t seen an element more significant than that tendency of improving at a consistent pace. This tendency to …
0
The human arsenal has always been expansive beyond all known limits, but at the same time, it hasn’t seen an element more significant than that tendency of improving at a consistent pace. This tendency to grow, no matter the situation, has brought the world some huge milestones, with technology emerging as quite a major member of the group. The reason why we hold technology in such a high regard is, by and large, predicated upon its skill-set, which guided us towards a reality that nobody could have ever imagined otherwise. Nevertheless, if we look beyond the surface for a second, it will become clear how the whole runner was also very much inspired from the way we applied those skills across a real world environment. The latter component, in fact, did a lot to give the creation a spectrum-wide presence, and as a result, initiate a full-blown tech revolution. Of course, this revolution then went on to scale up the human experience through some outright unique avenues, but even after achieving a feat so notable, technology will somehow continue to bring forth the right goods. The same has turned more and more evident in recent times, and assuming one new discovery ends up with the desired impact, it will only put that trend on a higher pedestal moving forward.
The researching teams at Cornell University and Max Planck Institute for Intelligent Systems have successfully discovered a new way to expand the collective behavior of swarming microrobots, helping them self-organize into diverse patterns. The primary idea, by mixing different sizes of the micron-scale bots, is to gain a lowdown on how future microrobots could perform targeted drug release, a process in which batches of microrobots transport and release a pharmaceutical product across the human body. Now, there have been efforts in the past to use means like algorithms, classical control, and physical intelligence for making large robots behave in a more intelligible manner, but when it comes to microscale technologies, the world is still seeking that all-important breakthrough. Talk about why is that the case, the answer is mainly rooted in how the stated technologies don’t have enough space where they can practically accommodate onboard computation. Interestingly, as a way of overcoming this challenge, the researchers here roped in 3D-printed polymer discs, each roughly the width of a human hair. After coating the discs with a thin layer of a ferromagnetic material and setting it in a 1.5-centimeter-wide pool of water, the team then applied two orthogonal external oscillating magnetic fields and adjusted their amplitude and frequency, causing each microrobot to spin on its center axis and generate its own flows. Such a mechanism would produce a series of magnetic, hydrodynamic and capillary forces, thus triggering the desired reaction.
“In our last paper, we showed that by using a single global signal we could actuate robots, in turn affecting their pairwise interactions to produce collective motion, contact- and non-contact-based manipulation of objects. Now we have shown that we can expand that repertoire of behaviors even further, simply by using different sizes of microrobots together, such that their pairwise interactions become asymmetry,” said Kirstin Petersen, senior co-author of the study.
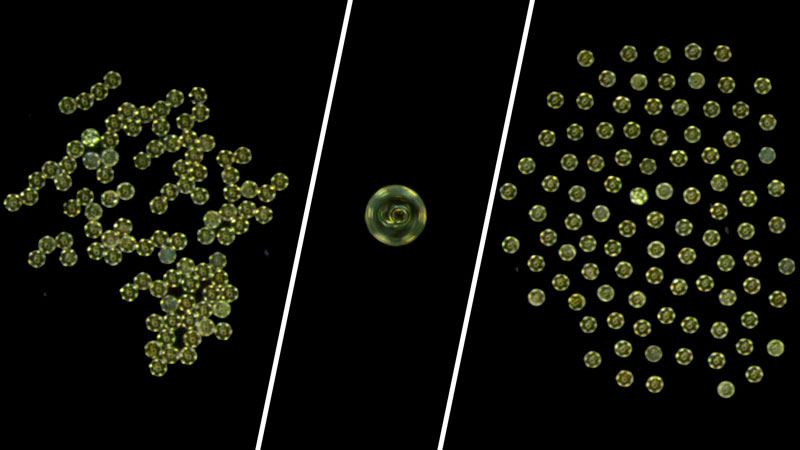
Another detail worth a mention talks to the study’s versatile nature. You see, with varying robot sizes coming into play, the researchers were able to control the swarm’s level of self-organization and how the microrobots assembled, dispersed, and moved. Not just that, they also displayed clear efficacy in altering the shape of the swarm from circular to elliptical. This manipulated microrobots into clustering together and forming subgroups. The stated reorganization further facilitated meaningful adjustments of the spacing between individual microrobots and ensured that swarm could collectively capture and expel external objects.
“The reason why we’re always excited when the systems are capable of caging and expulsion is that you could, for example, drink a vial with little microrobots that are completely inert to your human body, have them cage and transport medicine, and then bring it to the right point in your body and release it,” said Petersen. “It’s not perfect manipulation of objects, but in the behaviors of these microscale systems we’re starting to see a lot of parallels to more sophisticated robots despite their lack of computation, which is pretty exciting.”
As for the development’s future prospects, the hope is to take the model to a position where it can predict new and previously unseen swarming behaviors.