




Many things come together to keep human beings at the top of that proverbial food chain, and yet none have had a bigger impact than our desire to improve at a consistent pace. This unwavering …
0
Many things come together to keep human beings at the top of that proverbial food chain, and yet none have had a bigger impact than our desire to improve at a consistent pace. This unwavering commitment to growth has already brought the world some huge milestones, with technology emerging as quite a major member of the group. The reason why we hold technology in such a high regard is, by and large, predicated upon its skill-set, which guided us towards a reality that nobody could have ever imagined otherwise. Nevertheless, if we look beyond the surface for one hot second, it will become abundantly clear how the whole runner was also very much inspired from the way we applied those skills across a real-world environment. The latter component, in fact, did a lot to give the creation a spectrum-wide presence, and as a result, initiate a full-blown tech revolution. Of course, this revolution eventually went on to scale up the human experience through some outright unique avenues, but even after achieving a feat so notable, technology will somehow continue to bring forth the right goods. The same has turned more and more evident in recent times, and assuming one new discovery ends up with the desired impact, it will only put that trend on a higher pedestal moving forward.
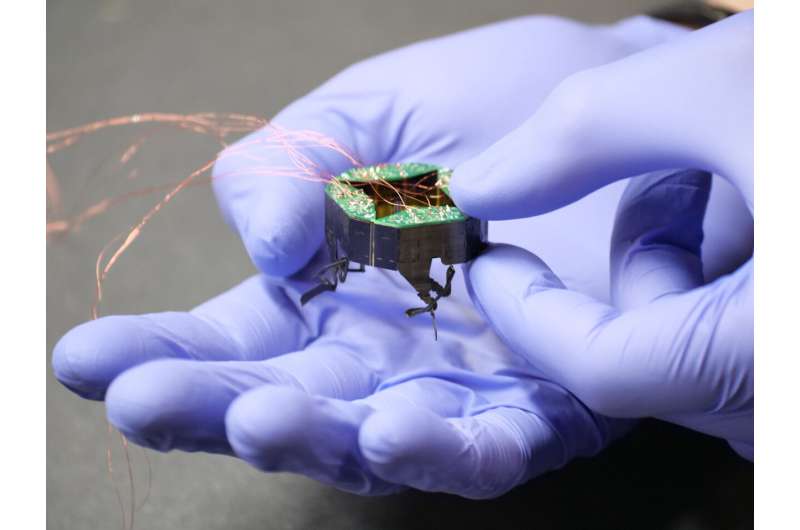
The researching team at University of Colorado Boulder has successfully developed a Compliant Legged Articulated Robotic Insect or CLARI, which is a squishable robot that can passively change its shape to squeeze through narrow gaps. According to certain reports, CLARI is basically shaped like a square with one leg along each of its four sides. That being said, a lot depends on how you squeeze the robot, as the pressure can make it both wider like a crab or more elongated like the cockroach. Statistically speaking, CLARI can morph from about 34 millimeters (1.3 inches) wide in its square shape to about 21 millimeters (0.8 inches) wide in its elongated form. Moving on, each of CLARI’s legs functions almost like an independent robot with its own circuit board and dual actuators that move the leg forward and backward and side-to-side. This modularity is what the researchers hope will allow the robot to take on an even wider variety of shapes
“It has a modular design, which means it’s very easy to customize and add more legs Eventually, we’d like to build an eight-legged, spider-style robot that could walk over a web,” said Heiko Kabutz, a doctoral student in the Paul M. Rady Department of Mechanical Engineering.
Another researcher involved in CLARI’s development happens to be Kaushik Jayaram, co-author of the study and an assistant professor of mechanical engineering at CU Boulder, who was also behind a separate robot that could squeeze through narrower spaces. Developed during his time as a graduate student at the University of California, Berkeley, Jayaram’s previous brainchild would deliver on its promised value proposition by compressing down to about half its height. However, as ingenious as it was, the stated robot only had the means to squeeze through vertical gaps. CLARI, on the other hand, is specifically designed to navigate horizontal gaps.
“What we want are general-purpose robots that can change shape and adapt to whatever the environmental conditions are,” Jayaram said. “In the animal world, that might be something like an amoeba, which has no well-defined shape but can change depending on whether it needs to move fast or engulf some food.”
For the immediate future, the researching team plans on making CLAI smaller and more nimble. Furthermore, if everything goes well, they will incorporate specialized sensors into the future versions of their development, thus empowering it to detect and react to obstacles. Hold on, there is more. You see, they are simultaneously looking to study how to give the robot the right mix of flexibility and strength. Alongside that, though, the team wants to overcome one sizeable CLARI limitation, which talks to the robot needing wires to receive the necessary power and basic commands.
“When we try to catch an insect, they can disappear into a gap,” Kabutz said. “But if we have robots with the capabilities of a spider or a fly, we can add cameras or sensors, and now we’re able to start exploring spaces we couldn’t get into before.