




The human arsenal has come across some really valuable elements over the years, and yet it still hasn’t seen anything more significant than that desire to grow at a consistent pace. We say this because …
0
The human arsenal has come across some really valuable elements over the years, and yet it still hasn’t seen anything more significant than that desire to grow at a consistent pace. We say this because the stated desire has brought the world some huge milestones, with technology emerging as quite a major member of the group. The reason why we hold technology in such a high regard is, by and large, predicated upon its skill-set, which guided us towards a reality that nobody could have ever imagined otherwise. Nevertheless, if we look beyond the surface for a second, it will become clear how the whole runner was also very much inspired from the way we applied those skills across a real world environment. The latter component, in fact, did a lot to give the creation a spectrum-wide presence, and as a result, initiate a full-blown tech revolution. Of course, this revolution then went on to scale up the human experience through some outright unique avenues, but even after achieving a feat so notable, technology will somehow continue to bring forth the right goods. The same has turned more and more evident in recent times, and assuming one new discovery ends up with the desired impact, it will only make that trend bigger and better moving forward.
The researching teams at Princeton University and Stanford University have successfully created a method, which if found scalable, can personalize the assistance offered by home robots. According to certain reports, the stated approach leverages capabilities of language learning models like ChatGPT to provide a generalized guideline that the robot can then go ahead and follow. Notably enough, these guidelines won’t be the only thing driving the cause home, as the robots will also be trained on small datasets and scenario examples. But how will the whole arrangement work on a more practical note? Well, once a user educates the robot with an instruction about their individual preferences, the latter will use those language learning models to basically create a summary, a summary which it can store to ensure that it doesn’t require any inputs from there onwards.
“For instance, one person may prefer storing shirts in the drawer, while another may prefer them on the shelf. We aim to build systems that can learn such preferences from just a handful of examples via prior interactions with a particular person. We show that robots can combine language-based planning and perception with the few-shot summarization capabilities of large language models (LLMs) to infer generalized user preferences that are broadly applicable to future interactions,” stated the published research paper.
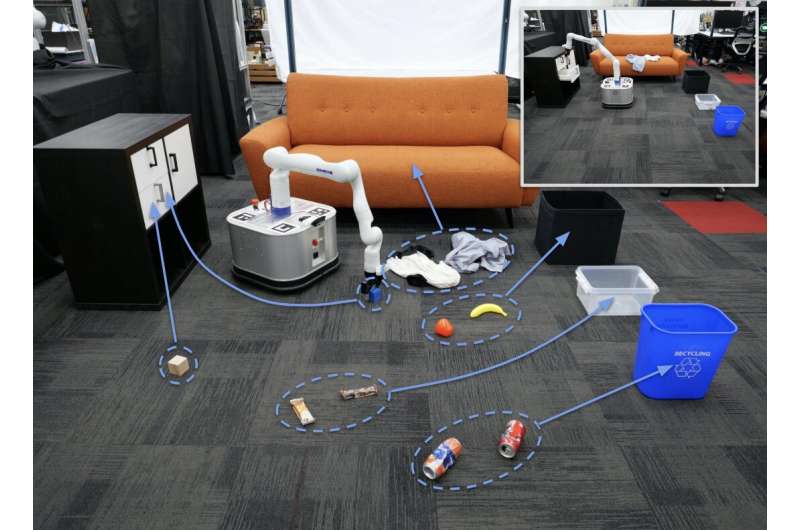
To gauge the validity of their approach, the researchers ran a series of tests on their in-house robot called TidyBot, who can clean floors and sort objects. Here, they assessed both the generalized preferences it produced when fed data from text-based datasets and how it affected the ability of a real robot to tidy up in personalized ways. Going by the available details, they observed the robot was able to achieve 91.2% accuracy on unseen objects in their benchmark dataset, while simultaneously showing the knowhow to put away 85.0% of objects in real-world test scenarios.
For future, though, the hope is to use the technology for creating more advanced robots that can function within different, complex home environments. This includes handing them the ability to operate rather seamlessly in cluttered spaces.
“Our implementation of the real-world system contains simplifications such as the use of hand-written manipulation primitives, use of top-down grasps, and assumption of known receptacle locations,” the researchers wrote. “These limitations could be addressed by incorporating more advanced primitives into our system and expanding the capabilities of the perception system. Additionally, since the mobile robots cannot drive over objects, the system would not work well in excessive clutter. It would be interesting to incorporate more advanced high-level planning, so that the robot could reason about whether it needs to first clear itself a path to move through the clutter.”